



From 7/03/2023 to 10/03/2023 the Marine Robotics team of the Systems, Robotics and Vision group (University of the Balearic Islands) has carried out the last data gathering campaign in the Cabrera Maritime and Terrestrial National Park, corresponding to the projects INVHALI and DETECPOS, both shared with IMEDEA.
The project INVHALI is focused on the detection and eradication of the invasive algae Halimeda Incrassata. This species comes from the Caribbean and has settled in diverse areas of the Balearic coast, especially in the south-east of Mallorca and in Cabrera archipelago. The detection of the algae is done by means of combining remote visual sensing with marine autonomous robots and applying off-line advanced image processing techniques based on deep learning.
This last campaign was entirely dedicated to exploring several marine areas of the Cabrera main island where detection and eradication of Halimeda is especially necessary from the biological point of view. Visual data was grabbed from a stereo camera installed on an AUV model Sparus II, property of the University, programmed to cover spots of special ecologic interests and marked by the biologist partners, following rectilinear transects at a constant altitude of 1 meter with a speed of 0.15 m/s, and 1.5 meters with a velocity of 0.18 m/s.
Additionally, the Sparus II was also programmed to perform several lawn-mower shaped surveys, at a constant altitude of 3 meters, in areas of Cabrera densely colonized with Posidonia. One of the objectives of DETECPOS is the inspection and assessment of this type of habitats exploring extend areas with the AUV to collect sequences of images, build photo-mosaics and compute, automatically, the Posidonia bottom coverage by means of image analysis and processing.
This strategy followed in both projects permits to extend considerably the areas, duration and depth of data collection missions and increase the precision in the calculation of coverages of both species, with respect to traditional approaches based on divers and manual extrapolative and approximated measurements and calculations.
The image processing techniques based on Neural Networks used in those two projects are being adapted and improved for species detection and identification tasks included in the PLOME project.
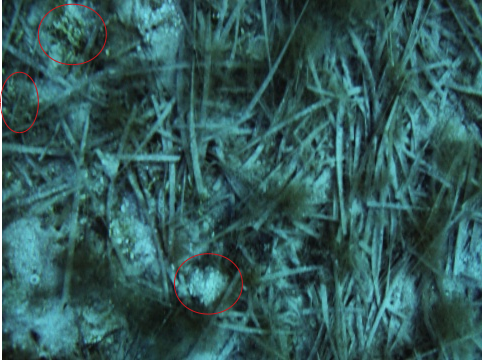
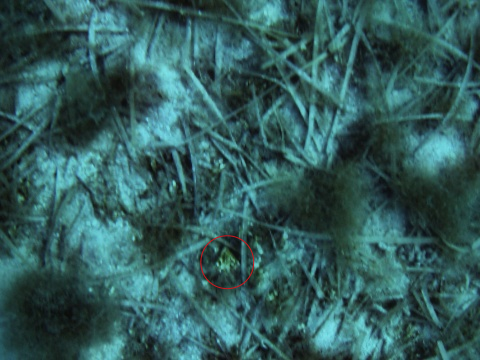
Pictures show two images with some Halimeda sprouts, circled in red, surrounded by rests of dead matter.

| Cookie | Duration | Description |
|---|---|---|
| cookielawinfo-checkbox-advertisement | 1 year | Set by the GDPR Cookie Consent plugin, this cookie is used to record the user consent for the cookies in the "Advertisement" category . |
| cookielawinfo-checkbox-analytics | 1 year | Set by the GDPR Cookie Consent plugin, this cookie is used to record the user consent for the cookies in the "Analytics" category . |
| cookielawinfo-checkbox-functional | 1 year | The cookie is set by the GDPR Cookie Consent plugin to record the user consent for the cookies in the category "Functional". |
| cookielawinfo-checkbox-necessary | 1 year | Set by the GDPR Cookie Consent plugin, this cookie is used to record the user consent for the cookies in the "Necessary" category . |
| cookielawinfo-checkbox-others | 1 year | Set by the GDPR Cookie Consent plugin, this cookie is used to store the user consent for cookies in the category "Others". |
| cookielawinfo-checkbox-performance | 1 year | Set by the GDPR Cookie Consent plugin, this cookie is used to store the user consent for cookies in the category "Performance". |
| CookieLawInfoConsent | 1 year | Records the default button state of the corresponding category & the status of CCPA. It works only in coordination with the primary cookie. |
| Cookie | Duration | Description |
|---|---|---|
| _ga | 2 years | The _ga cookie, installed by Google Analytics, calculates visitor, session and campaign data and also keeps track of site usage for the site's analytics report. The cookie stores information anonymously and assigns a randomly generated number to recognize unique visitors. |
| _ga_43J69ZE6HX | 2 years | This cookie is installed by Google Analytics. |