
Broadening our knowledge of Informative Path Planning for the optimization of acoustic localization.
Our PhD student on underwater robotics and researcher in the PLOME project, Marta Real, did a research stay at Cardiff […]

Our PhD student on underwater robotics and researcher in the PLOME project, Marta Real, did a research stay at Cardiff […]

Over the years, MARTECH has become an event in which to find the most significant advances in marine technologies that
PLOME present at the MARTECH-2024 Workshop held in Palma Read More »
The source code of the Middleware developed for the PLOME project, has been uploaded to the open-access repositories Zenodo and
Open-Access Release: PLOME Project Middleware for Acoustic Communication Integration Read More »
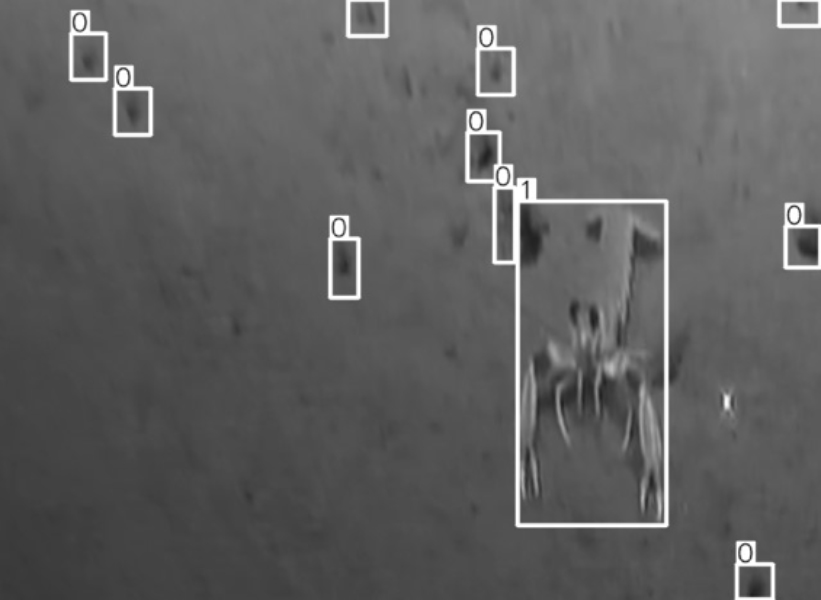
The Norway lobster (Nephrops norvegicus) is one of the most important fishery items for the EU blue economy. The coopearation
