VICOROB Research Group
The Computer Vision and Robotics Research Group (VICOROB)is a research group from the University of Girona , Spain, devoted to the research related to the areas of computer vision, image processing and robotics. The Underwater Robotics and Vision Research Lab (CIRS) is part of ViCOROB. At CIRS, there are two main research lines: underwater robotics and underwater vision. The research team has a strong experience in the design and development of hovering AUV prototypes with high-resolution image mapping capabilities. 5 AUV prototypes have been designed during the last 10 years, all of them having a different conceptual design. VICOROB has also a long experience in intelligent control architectures and has contributed in mission control systems, behavior-based architectures, robot learning and path planning for AUVs.

UNIVERSITAT POLITÈCNICA DE CATALUNYA
SARTI Technological Development Center
The SARTI is a research team within the UPC devoted to the research and development in the field of electronics and instrumentation for marine technologies. The last few years, SARTI has been involved in high tech marine instrumentation facilities design and deployment that cover the full data chain from sensors to the data cloud, e.g. UPC has operated the underwater shallow observatory OBSEA since 2009, where continuous marine data time series has been archived and offers services as a test site for validations of underwater sensors in real environments. SARTI is an active member of OGC, SOSC (Smart Ocean Sensor Consortium) and IEEE.


UNIVERSIDAD DE LAS ISLAS BALEARES
Systems, Robotics and Vision Group
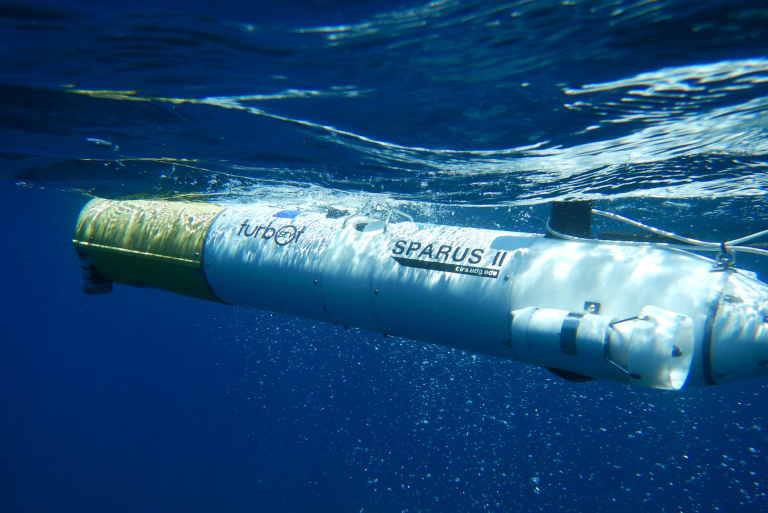
For more than 25 years, the Systems, Robotics and Vision (SRV) group at UIB has accumulated a wealth of experience in Computer Vision and Mobile Robotics, contributing to numerous scientific papers, competitive projects and contracts with companies and institutions. The group, led by Gabriel Oliver, is currently made up of ten permanent researchers, a variable number of PhD students and two engineers. Among the research lines of the group, we can highlight the following related to PLOME, all of them regarding marine robotics: Path planning, control and localization, multi-robot cooperation, 2D and 3D subsea mapping using stereo and camera-laser systems; mission-time replanning and active exploration; Deep Learning for 2D (image) and 3D (pointclouds) object recognition. Given that the group has two operative marine robots (i.e. a Sparus-II AUV and an ASV) all the lab developments are thoroughly tested in real field conditions.
UNIVERSIDAD POLITÉCNICA DE MADRID
I2A2 Research Group
The researchers that make up the I2A2 research group have been developing their activity in the field of instrumentation at UPM since 1990 even before the creation of the group itself in 1997. This activity has been developed in different areas, mainly related to virtual instrumentation, automatic measurement systems, advanced data acquisition systems for complex experiments, such as thermonuclear fusion, the development of embedded systems for SHM applications and the development of new generation instruments based on digital signal processors and mobile communications.
Consejo Superior de Investigaciones Científicas - INSTITUTO DE CIENCIAS DEL MAR
ICM Research Group
The Research Group of the Instituto de Ciencias del Mar (ICM-CSIC), has an accredited trajectory in the study of marine communities and resources. The research team “Functioning and Vulnerability of Marine Ecosystems” is led by Joan B. Company (Head of the Marine Renewable Resources Department). The team is officially recognized as a Research Quality Team by the Spanish Government and Catalan Autonomous Government (2018-2021). The group activities are organized into four transversal axes, one per principal investigators (2 of them in PLOME: no. 1 “Development of scientific tools for ecosystem-based fishery management”, led by Dr. J.B. Company; no. 4 “Technological solution for ecosystem and animal behavior monitoring”, led by Dr. J. Aguzzi). In particular, the no. 4 axis is centered on the implementation of protocols for image processing to extract biological data, collaborating in the task with mayor international infrastructural networks such as the ONC, the EMSO or the Dense Ocean Floor Network for Earthquakes and Tsunamis (DONET) from Japan. In the last 15 years, the ICM-CSIC team has coordinated several national research projects on ecosystems functioning and fishery management (RECS, PROMETEO, DOSMARES, CONECTA, RESNEP, CARIBE), at regional level (UniArt, PESCAT, 50Sels, SAP, CGCAT) and at European level (GAP1, GAP2, CONFISH, IMPLEMED).
IQUA ROBOTICS
IQUA Robotics spin-off company
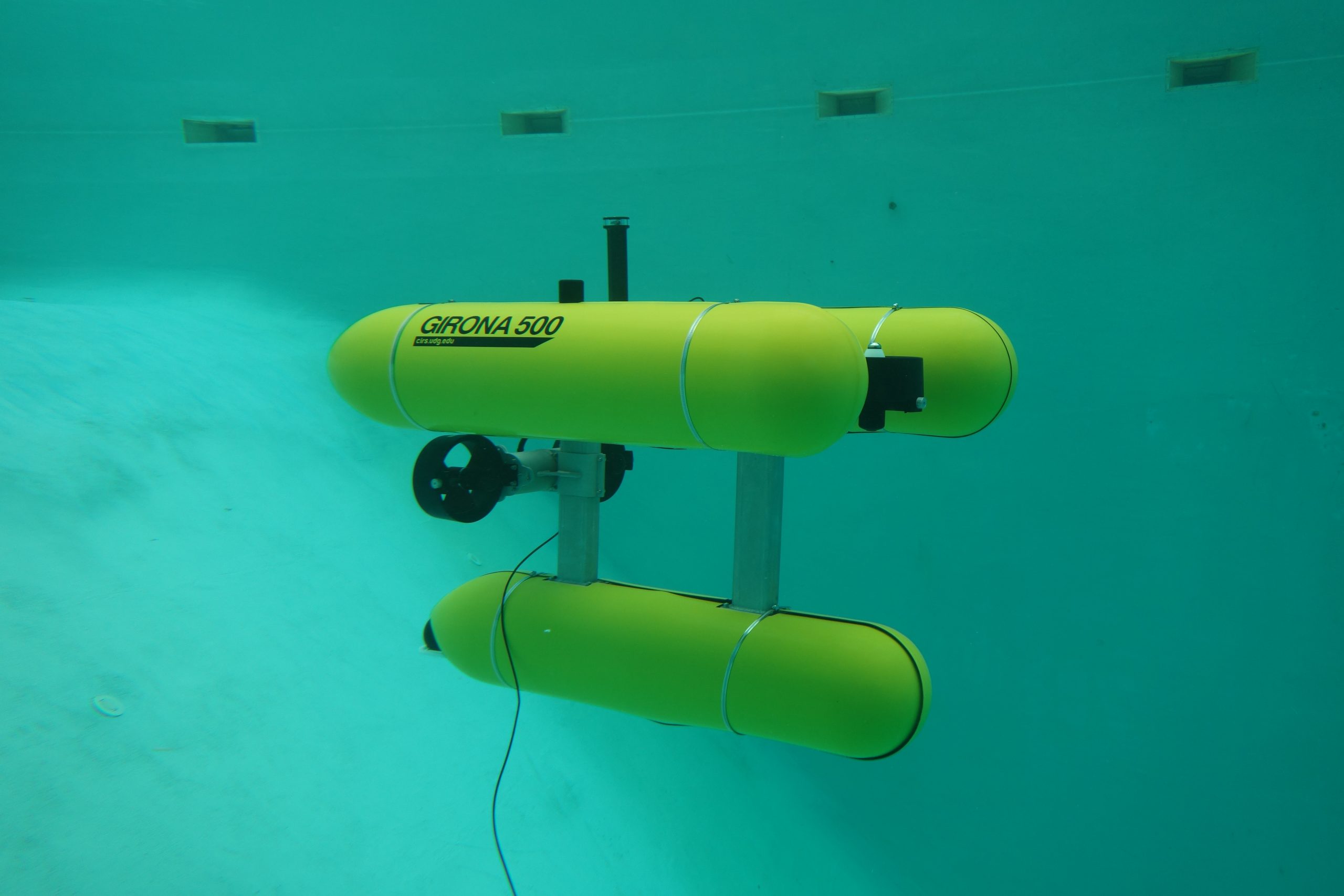
IQUA ROBOTICS is a spin-off company from the University of Girona created in 2016. IQUA designs, develops and manufactures AUV systems which can be adapted for a wide range of research and professional applications. IQUA currently commercializes the Girona 500 and the Sparus II, two lightweight and versatile vehicles which can be easily configured for any task, by integrating navigation and mapping equipment according to the customer’s needs. Easy adaptation make IQUA’s product appealing to many scientific and academic applications. The company is expert in designing and developing all aspects related to AUVs: pressure housings, battery systems, underwater electrical connections, embedded systems, software architectures, device drivers, graphical user interfaces and algorithms for navigation, control, guidance and security. The company also commercializes hardware and software solutions for the underwater exploration market. Relevant in the PLOME context is the commercialization of SoundTiles, a unique mosaicing software for acoustic images.
